 2007, Vol. 33
2007, Vol. 33 2. 江苏省连云港市气象局;
3. 江苏省南通市气象局
2. Lianyungang Meteorological Office, Jiangsu Province;
3. Nantong Meteorological Office, Jiangsu Province
我国新一代天气雷达投入业务运行以来,在雷达的故障分析及维护保障方面,已积累了一些实践经验[1-3]。胡东明等[4]依据CINRAD/SA雷达系统完善的自动定标系统和可靠的故障诊断系统,利用其“故障报警信息”和“雷达性能参数”,完成对雷达系统的日常维护及故障诊断。王志武、周红根等[2]搜集和整理了十几个CINRAD/SA/ B雷达出现的相似故障,由此,针对性地提出了一些加强新一代天气雷达可靠性的措施和改进雷达性能的意见。周红根等[3]通过对连云港CINRAD/SA天气雷达安装调试以来所出现的故障,从雷达硬件和软件两方面来分析各类故障成因,由此提出相应的解决方法和措施。目前CINRAD/SA雷达天伺系统故障率相对较高,本文从连云港等多个CINRAD/SA雷达中,选取由于天伺系统造成PUP图像产品异常的两类特殊故障,通过使用雷达RDASOT测试程序,分析雷达基数据,测量和比较测速反馈电压等方法,对雷达回波在不确定的某个方位上出现在径向上的错位故障和回波图像上出现毛刷现象的故障进行分析,揭示它们的故障成因。
1 伺服系统的构成CINRAD/SA雷达伺服系统在电路上采用了三个环路的结构形式:即位置环、速度环和加速度环。每个环都为一阶无静差系统。
CINRAD/SA雷达在方位上采取了复合控制技术,引入了位置命令的导数即角速度Ra来实现开、闭环复合控制。采用复合控制在理论上可使动态滞后误差为零。如果原系统为一阶无静差,则采用复合控制后系统将等效为二阶无静差。俯仰采用Doublet控制策略。所谓Doublet控制策略就是天线仰角从一个体扫转到下一个体扫时,伺服位置环开环,RDA计算机命令D/A输出正最大电压(10V)至速率环,速率环带动天线作匀加速转动,假设加速时间为t1,然后R DA计算机命令D/A输出负最大直流电压(-10V)使天线作匀减速运动,设减速时间为t2。不管在哪一个体扫,t1都大于t2,即加速时间长,减速时间短。当天线快要达到命令所规定的位置时,再按误差控制即闭上位置环。
2 雷达回波在不确定方位上出现径向错位故障的成因分析故障现象:雷达回波在不确定的某个方位上明显存在距离上的折叠错位现象。
分析检修过程:首先从雷达回波图分析,选取两个典型出错的连续立体扫描,比较前后两个体扫0.5°和1.5°强度图时,发现0.5°强度图上第一个体扫在197°处,有明显的折叠错位,而后一体扫0.5°强度图基本正常;在1.5°强度图上,前后两个体扫分别在253.5°和205.2°处,有明显的折叠错位。在折叠错位的两边,回波强度存在较大差异。通过读取该时次雷达基数据分析,发现在0.5°仰角扫描时,两个体扫仰角波动范围较大(见表 1),达0.3°~0.4°,大大超出伺服系统控制精度要求小于0.1°的技术指标。而1. 5°仰角扫描时,两个体扫仰角波动小于0.1°。因此可以确定雷达俯仰从19.6°下降到0.5°,存在过冲现象。
|
|
表 1 折叠错位时两个连续体扫对比 |

从雷达伺服系统5A6的角度显示上,验证了俯仰系统存在过冲现象。停机,用RDASOT工具软件, 对雷达天线座进行人工控制,当设置天线在-1.0°至30.0°作俯仰运行时, 天线有时过冲至死限位,俯仰系统运行的声音正常,调整俯仰齿轮之间的齿距,未能解决天线过冲问题。调整及更换5A6模拟板,故障依旧。测试上下光纤板ELTACH输入、输出等信号均正常。上光纤板R13、R14电阻值分别为18kΩ、6.2kΩ, 在保证其电阻值比为3:1的前提下,调大R13、R 14电阻,当R13、R14分别为450kΩ、150kΩ时,过冲现象消失。对伺服系统仰角控制误差在12个不同仰角上测试结果的均方根误差为0.06°,符合≤0.1°的技术指标要求。
解决过冲问题后,雷达正常开机,折叠错位现象不时出现,从相邻体扫雷达回波资料分析,超出了正常回波演变的可能,估计信号处理板存在问题。更换两块HPS硬件信号处理板后,连续运行48小时,故障现象消失,雷达回波图恢复正常。分析故障原因,由于俯仰系统存在过冲现象和硬件信号处理板故障,导致回波信号不能被正确处理。俯仰过冲现象是常见故障,许多台站均出现过,一般对国产伺服电机,通过调大上光纤板R13、R14电阻,来解决过冲问题。信号处理板故障,只能更换信号处理板。
3 回波图像上出现毛刷现象故障成因分析故障现象:雷达连续工作4小时以上,出现毛刷现象,此时雷达无报警,雷达性能参数正常,但天线运转有异常声音。如果雷达继续开机,毛刷现象就会连续或间断的出现在图像的不确定区域内。雷达待机后,重新运行,连续工作4小时后重复上述故障现象。
故障分析和检修过程:雷达停机,打开进入天线罩门,取消天线罩门开关控制功能。雷达正常开机,待天线运转有异常声音时,通过打开的天线罩门观察天线,发现天线在方位转动过程中不匀速, 有突然停顿再加速现象, 造成天线座有强烈震感,发出异常响声。
雷达待机,用RDASOT程序,控制天线方位按照25°·s-1或35°·s-1的速度运转,在5A6-AP2数字板上,测量R20与地间的直流测速电压值,发现测速电压有跳变,当跳变增大时,天线转速加快。
按照伺服系统的原理,从天线的机械系统、驱动、速度反馈等方面来分析该故障。首先检查滑环,对滑环进行清洁处理,并且进一步检查滑环中碳刷,长度适中,接触良好。用手轮摇动方位转动2周,天线转动平稳,无异常声音,初步判断雷达机械部分是正常的。
其次,由于俯仰系统正常,将方位和俯仰功放互换,即把5A7中功率放大单元内的方位与俯仰功率放大器上电缆线头XP(P)10、XP(P)9、XP(P)8分别与XP(P)7、XP(P)6、XP(P)5对应进行互换,雷达开机,故障依旧。检查轴角盒A6,由于方位和俯仰轴角编码器两支路电路相同,把方位和俯仰编码器输入输出接口进行互换,雷达开机,毛刷现象仍然存在,进一步判断轴角编码器是好的。
再次,对测速支路进行检测。表 2中记录了VCP21模式下,各仰角设计的标准测速电压值。公式(1)是测速电压与天线转速的关系:

|
(1) |
|
|
表 2 VCP21模式下新旧电机测速电压对比表(电压单位:V) |
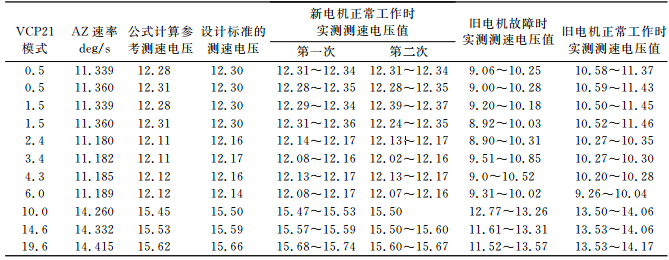
36表示天线设计最大转速36°·s-1;39表示天线设计最大驱动电压39V;C表示天线某仰角时的转速°·s-1;D表示该仰角时的测速电压。
按照公式(1),对该模式下各仰角的不同转速,分别计算出参考测速电压值(见表 2),雷达设计的标准测速电压值和按公式计算出的测速参考电压值基本一致,最大相差0.06V。雷达按VCP21模式工作时,在5A6-AP2数字板上,测量R20与地间的直流测速电压值。表 2中记录了测量雷达图像正常及有毛刷现象时各仰角的测速电压值,对表 2中的测速电压分析可见,不管回波图像是否有毛刷现象,实测的测速电压值明显偏小,与标准测速电压值相差达1~3V左右,而且不稳定,波动较大,无法满足误差在标准测速电压值的±5%以内,从而造成雷达运转不均匀。
由于方位电机与测速电机一体,更换新的电机后,用VCP21模式开机,测量测速电压值见表 2中新电机第一次测量值,比较测速电压与标准测速电压基本一致。连续观察几个体扫,测速电压很稳定。雷达进行48小时连续考机,回波图像正常。考机结束前,再次测量测速电压见表 2中新电机第二次测量值。分析两次测速电压与标准测速电压基本一致,满足误差要求,故障排除。
故障成因分析:通过测量旧电机,发现方位电机H、I两端阻值约1.0Ω,测速电机A、B两端电阻27.2Ω,测量新电机,它的方位电机阻值约为3.1Ω,测速电机电阻值为51Ω,旧电机的电阻值明显偏小。再结合表 2分析结果,认定旧电机性能变差了,连续工作几小时后,电机性能会变得更差,输出测速电压严重偏小,而且不稳定,从而造成雷达转动不匀速。从雷达回波上分析,可见在方位30°~90°和150°~220°之间明显存在毛刷现象。分析该时次的雷达基数据,发现在方位30°~90°和150°~220°之间,某些方位无径向数据,某些方位有2~4个径向数据,并存在方位角度的跳变,不连续现象。直接后果使采集和存储的雷达基数据发生混乱,生成的雷达图像出现毛刷现象。该故障在连云港、南京等多个雷达站出现过,国产电机产生此故障较多,进口电机也出现过此类故障。因此,希望厂方加强产品质检,选用高性能高质量的雷达电机。
4 小结在上面两个故障实例分析过程中,可以从雷达PUP生成产品出现的异常现象,通过对雷达基数据的分析,来及时发现雷达系统可能存在问题,防止故障的进一步扩大化。只要维护人员不断增强对整个雷达系统的维护和保养意识,深入了解整个系统的工作流程,养成密切关注雷达产品,经常检查和自动标校雷达各项参数的习惯,随时掌握系统的运行状况,当系统出现故障时,要及时分析故障原因,同时要不断进行总结和交流。只有这样,才能不断提高对CINRAD/SA雷达的保障能力。
| [1] |
杨传风, 黄秀韶. CINRAD/SA雷达发射高压故障诊断[J]. 气象, 2005, 31(1): 88-89. |
| [2] |
王志武, 周红根, 林忠南, 等. 新一代天气雷达SA&B的故障分析[J]. 现代雷达, 2005, 27(1): 16-18. |
| [3] |
周红根, 朱敏华, 段素莲, 等. CINRAD/SA雷达故障分析[J]. 气象, 2005, 31(10): 39-42. DOI:10.7519/j.issn.1000-0526.2005.10.010 |
| [4] |
胡东明, 伍志方. CINRAD/SA雷达日常维护及故障诊断方法[J]. 气象, 2003, 29(10): 26-28. |