 2007, Vol. 33
2007, Vol. 33 多普勒雷达资料具有常规气象观测资料无可比拟的时间和空间的高分辨率,是研究中小尺度天气系统的主要手段之一。由于计算机技术和数值天气预报的不断发展,雷达对中小尺度天气的研究起着越来越重要的作用。随着中国新一代多普勒天气雷达观测网逐步投入业务运行,多普勒雷达探测覆盖面、探测能力和探测资料迅速增加,但是考虑到在大多数地区要获取双雷达资料是不大可能的。因此,研究如何有效地将单多普勒雷达资料转变成大气模式预报变量和台站预报员熟悉的信息显得尤为重要和必要。过去几十年里国内外研究发展了许多多普勒雷达风场反演的方法[1-2]。国内外的研究都证明多普勒天气雷达资料4DVAR同化反演技术在理论上是先进的。
研究多普勒雷达资料4DVAR同化技术的最终目标是投入业务使用。但是到目前为止, 多普勒雷达资料的4DVAR同化大多应用在科学研究上, 特别是在国内类似工作仍处在试验研究阶段,为了考察多普勒雷达资料4DVAR同化技术在业务运用中的反演能力和变分同化中可能存在的问题并针对问题加以改进, 利用Sun等[3]建立的变分同化系统, 进行了多普勒雷达资料4DVAR同化反演的准业务化试验研究,所得结果对于业务化多普勒雷达资料的实时4DVAR同化反演有重要的参考价值。
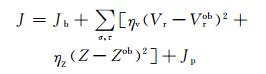
1 模式、资料和试验方案 1.1 模式简介同化模式和变分同化方法由Sun等[3]建立,这里仅对其作一简要介绍,详细内容可查阅文献[3]。同化模式为一个三维云模式,云模式建立在笛卡儿坐标系中,采用滞弹性近似,包含6个预报方程,它们是3个动量方程、热力方程、雨水方程和总水方程。数值模式以无量纲变量形式编程,这样可以平衡不同变量量级的差异,使得在同化过程中每个变量有相似的权重从而得到更好的收敛率。4DVAR资料同化的基本思想就是找模式变量的最优初始场,使得模式输出结果在一定的时间域和空间域上与相应的观测结果尽可能接近[1]。为此单部雷达价值函数J为:
|
其中求和针对空间区域σ、同化窗τ而言,ηv和ηZ分别是径向速度和反射率的权重系数,Vrob和Zob是雷达观测的径向速度和反射率。Vr和Z表示模式输出的径向速度和反射率。具体算法见文献[3],在此就不再赘述。
1.2 资料和试验设计文中所用的是广州、济南雷达站提供的雷达原始资料。将资料进行预处理后,把资料插值到直角坐标系下均匀分布的等距网格上再进入模式运算。在模式分析中,假定雷达体扫是某一时刻的值,每两个体积扫描间隔基本在6分钟左右,所以文中的所有试验中,同化窗都取6分钟,积分步长取15秒,模式采用分辨率为,Δx=Δy=3km,Δz=0.5km格点数50×50×7。反演过程中都是以雷达站为原点,水平方向上以:向东为x正方向,向北为y正方向。4DVAR分析是连续循环的程序,每次输入相邻的两个体扫资料,每个循环可获得同化窗内后一时刻的风场,这些数据被保存和显示,并作为下一循环的初始场和背景场,如果没有找到前一同化窗的反演结果,使用雷达的VAD分析作为初始场。每一个循环过程实际上都是最小化价值函数的过程,利用准牛顿迭代法最优化价值函数。
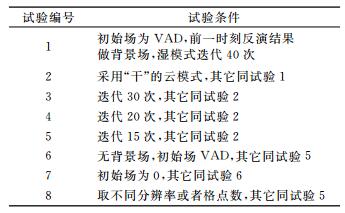
我们发现只要反演数据是相关的,价值函数一般在30~50次时变得比较平滑[3-4],所以选择40次即可得到比较好的结果。为了研究简化的模式反演风场的可靠性,以满足业务运行的要求,本文将模式移植到PC机上运行,进行表 1中的各种试验,并把试验1——利用前一时刻反演结果作为背景场,含有湿过程的云模式迭代40次的结果作为控制试验,试验2除了未考虑云模式的湿过程外,其它都与控制试验是一致的,主要是要考察它和控制试验的差异,用以检验干模式的可靠性。考虑到业务应用的需要,比较试验3、4、5,找到运行时间较少、风场也比较合理的可以业务应用的结果。另外,本文还就背景场、初始场对反演结果的影响进行了分析(试验6、7),考察其对结果的敏感性;采用不同分辨率和不同反演区域对风场结果进行对比(试验8),考察“干”模式的稳定性。
|
|
表 1 试验条件描述 |
考虑了云模式的湿过程,加入了云水、雨水等因子,由于同时考虑了动力和湿物理过程,理论上讲更接近大气实际的情况。许小永[4],Sun[5]等都证明了湿模式反演结果的合理性。为了说明湿模式风场结构与回波强度具有很好的一致性,本文采用了广州、济南等地的3个个例进行说明。
本文分析了济南2004年6月21日的一次较强过程(简称个例1),进行试验1的反演结果如图 1a(见彩页)。由于济南雷达和滨州雷达距离比较近,利用双雷达的风场结果(图 1b,见彩页)与之对比。我们看到强回波带附近的风场趋势基本一致,反演区域上部为一个中尺度气旋,仅在反演区域边缘回波较弱区域的风场存在一定差异。在回波较强、体现系统主要特征的区域风场还是比较一致的。

|
图 1 个例1单雷达反演风场(a)与双雷达反演风场(b)对比图(1.0km高度) |
虽然双雷达反演风场具有较好的可靠性,但是目前国内能利用双雷达反演风场的地区并不多,这里用单雷达4DVAR方法反演的风场和双雷达的基本一致,可考虑用作控制试验。
第二个过程是广州2005年6月22日多普勒雷达观测到的一次明显的辐合过程(以下简称个例2)。在雷达东南方向约100km附近,有一片较强回波,最强达到45dBz。雷达所在的位置在模式坐标中为(0,0),以距离雷达东部45km,南部105km为反演中心(即:(45, -105)),对覆盖周围150km×150km的水平范围进行反演。由于模式范围和雷达观测空间范围有限等原因,本个例对时长约80分钟的资料进行了连续的循环反演,运算从3:43开始,第一个结果是3:49,到5:06结束。
反演结果表明:强回波区域对应风速辐合(图略),辐合区3:49在距离雷达(75, -105)(单位:km)附近,图中最强回波也在此处;风场辐合和强回波4:13移动到(90, -120)附近,到了5:00它们即将移出反演区域。辐合的移动和发展,也体现了强回波的移动和发展,风场和回波的配合较好,基本反映了系统的发展和移动。从径向速度图上不能直观地看到这么多信息,4DVAR反演风场结果可以让预报员直观地了解系统发展和移动方向,从而及时做出更准确的预报。
将反演的水平风场反算成径向速度与观测径向速度对比,在正径向速度区流线的径向方向基本都是远离雷达的,在负径向速度回波区流线的径向方向基本都是趋近雷达的,在零线位置,水平风场的流线基本与零线垂直。因此从流线的方向和与零线位置的交角看,反演的风场的风向分布是基本正确的, 而且它们之间的均方根误差值很小(表 2),平均仅有1.39m·s-1,因此,将此作为控制试验,还是比较合理的。
|
|
表 2 个例2各时刻在1.0km高度上观测径向速度与试验1反算径向速度的均方根误差(单位:m·s-1) |

第三个过程是广州2005年3月22日的一次飑线过程(以下简称个例3)。有一南北向的弓状强回波带从西面向雷达站移过来,最强达到60dBz,一般在飑线上有气旋性气流和强的切变存在。以距离雷达西部60km,北部75km为中心(即:(-60, 75)),对覆盖周围150km×150km的水平范围进行反演。
进行试验1,反演结果与概念模型是相吻合的,较低层风场呈气旋式分布(图略)。而且风场速度很大,有很多地方都超过了40m·s-1。1km和2km高度上的气旋中心大约都位于强回波带的北端距雷达(-60, 110)(单位:km)的地方,从涡旋中心往左下部延伸出一条很强的切变线至(-105, 40),切变线前较强的西南气流带来较多水汽,使得强回波带位于距雷达站点以西0~30km左右,并向北延伸出去。反算的径向速度和观测的径向速度形势分布基本一致。统计了各高度上模式反算径向速度和观测值的均方根误差,平均值为4.34m·s-1,相对于风场速度(平均速度达11.3m·s-1,最大速度达59.7m·s-1)来说是比较小的。用作控制试验还是具有一定合理性。
从Sun[3, 5, 6], 许小永[4, 7]等人的研究以及上面3个个例分析都可以看到,同化单部雷达资料,利用前一时次反演结果作为背景场的湿模式迭代40次,可以将中尺度系统的主要结构反演出来,反演结果反算的径向速度和观测值差异也较小。这主要是由于与干模式相比,增加了云模式的湿过程,即同时考虑了动力和湿微物理过程,从理论上讲更接近大气实际的情况[4, 5]。所以本文以试验1作为控制试验,用以检验干模式的反演结果的敏感性。
3 干模式敏感性试验含有湿过程的反演结果可能会更接近真实的风场,但是4DVAR同化多普勒雷达资料的计算量是巨大的,就目前的计算能力和模式本身的误差,特别是微物理方案的误差而言,还不能做到用包含完整物理过程的云模式实时同化业务多普勒雷达观测资料。如果,不考虑模式中的湿物理过程,采用“干”的云模式(纯动力学模式)能够得到允许误差范围内的低层水平风场,那么这对于4DVAR同化方法投入实时业务使用是有重要意义和实用价值的。
3.1 有无湿过程的敏感性检验作为将4DVAR同化方法应用到业务中的第一步,就是将云模式中的湿过程忽略掉,进行试验2。对于个例2,含有湿过程与仅考虑纯动力过程的云模式所得结果差别不大,1.0km高度上的风场之间的均方根差别各时刻平均仅0.65m·s-1,特别是,在开始阶段差别较大,随着模式趋于稳定后,差别在0.5m·s-1左右(表 3)。试验2反演出的风场结构与控制试验的结果也比较一致,风场和回波的配合较好,基本反映了系统的发展和移动。
|
|
表 3 个例2不同时刻进行试验1和试验2在1.0km高度上风场的均方根差别(E单位:m·s-1) |

当我们把4DVAR系统用到业务上时,都希望能尽快获得风场结果,以适应风暴演变剧烈快速移动的特点,及早做出判断。在配置为Pentium4 Processor 2.0G/RAM 1G/PC机上,采用干模式每次同化迭代15次只需运行4~5分钟;迭代20次需6分钟左右;迭代40次需12分钟。个例2分别进行试验3、4、5所得风场速度与试验2的均方根差别如图 2,迭代次数较多的均方根差别较小。迭代15次与40次均方根差别各时次平均为图 2个例2进行试验3、4、5与试验2所得风场在1.0km高度上不同时刻均方根差别E的对比2.37m·s-1。图 3(见彩页)即为个例2干模式迭代15次在1.0km高度上的结果。与试验1所得风场结果趋势基本一致,水平风场很好地反映了低层辐合的过程。在业务运行中考虑到时间因素,一般要求我们在6分钟内完成一个循环,即:下一个体扫结果出来之前得到风场结构,选择迭代15~20次的纯动力模式即可实现这一要求。只是各时刻迭代15次的速度略为偏小,这是因为4DVAR同化方法就是使预测值与观测值之间的差距最小化的过程,一般来说,在一定范围内迭代次数越多它们之间的差距就越小,预测值也就越接近真实值,所以迭代15次的风速要比迭代40次的小。

|
图 2 个例2进行试验3/4/5与试验2所得风场在1.0km高度上不同时刻均方根差别E的对比 |

|
图 3 个例2在1.0km高度观测反射率和试验5反演水平风场的叠加 (a)3:49,(b)4:36 |
对于个例3同样有这样的规律。采用干模式有背景场分别30次、20次、15次与迭代40次的风场速度均方根差别,各高度平均的均方根差别分别为1.34m·s-1、3.16m·s-1、4.08m·s-1,均方根差别相对速度场(最大速度达59.7m·s-1)来说还是比较小的。将试验5的结果(图 4,见彩页)与试验1的结果比较,风场分布比较一致,风场的基本特征都很好地显示出来了。

|
图 4 个例3观测反射率和试验5所得水平风场叠加 (a)H=1.0km,(b)H=2.0km |
干模式有背景场迭代15次所得风场与迭代40次的均方根差异比较小,与控制试验的风场趋势基本一致,能很好地表现出中尺度系统的基本特征,预报员在业务运行雷达实时4DVAR同化反演时,主要是针对具有明显中尺度特征的区域,以便可以更及时更准确地得到预报结论。所以利用前一时次结果作为背景场“干”模式迭代15~20次的结果,是完全符合业务应用中的实际需求的,基本可以满足强天气预报的需要。
3.3 背景场对反演结果的影响雷达资料观测通常并不充满雷达覆盖范围,在模式中经常出现无效值,这就需要一个背景场来填补这些无效值,并提供最小化程序的初始场。这样可以使得结果更接近真实值。
对个例2进行试验6,VAD作为初始场被引入模式中,而没有使用前一时次的反演结果作背景场。试验6的风场结果与试验2的均方根差别各时刻平均为3.46m·s-1(图 5),比试验5的仅大1m·s-1,这是由于在同化窗初始时刻加入第一个雷达体扫数据的VAD分析,它能代表所在区域平均风廓线情况,在流场变化不大的情况下,可以对反演结果起到背景场的作用。

|
图 5 个例2各时刻试验5、6、7在1.0km高度上所得风场分别与试验2的均方根差别(E) |
在试验7中,去掉这种初始场,把零速度场赋给初始场,得到的结果与试验2的差别各时刻平均达到7.91m·s-1(图 5)。以零速度场为初始值,迭代次数又较少时,预报值和观测值之间的差异显然很大,价值函数的收敛不如使用其它环境场或背景场作为初值带入时快。可以看出,一个比较好的初始场对于模式的结果影响很大,尤其是在迭代次数较少的情况。
对个例3也进行试验6和试验7,如图 6所示,使用前一时次结果做背景场时均方根差别比无背景场时小很多。VAD和零速度场作初始场时的各高度平均均方根差别分别为7.50m·s-1、9.59m·s-1,比使用背景场的误差都要大许多,使用零速度场作为初始场比使用前一时刻结果作为背景迭代15次的误差大了两倍多。使用VAD作初始场的效果也不如个例2的明显,误差还是比较大,这是因为VAD代表的是环境的平均风情况,个例3的飑线过程风场变化很大,使得误差增加。

|
图 6 个例3进行试验5、6、7所得风场在各高度上分别与试验2的均方根差别(E) |
背景场在模式结果中起着相当重要的作用,试验2将前一时刻的模式结果作为背景场,引入了更接近最优初始场的初值作为初始猜测和背景场,具有更多的信息对模式变量进行约束,各变量反演场在分布结构和数值大小上都更接近真实场。背景场的加入是提高4D-VAR同化效果的有效途径之一[5]。在没有背景场的情况下,用VAD作为初始场,代表环境的背景场,在风场变化较小时也能取得较好的效果。
3.4 分辨率和反演范围的影响为了进一步考察迭代15~20次的“干”模式在准业务化试验中的稳定性,改变个例2分辨率和网格数,将格点设为26×26×7,水平分辨率为6km×6km,垂直分辨率不变。仍然以距离雷达东部45km,南部105km为反演中心,对覆盖周围150km×150km的水平范围进行反演,迭代15次所得结果与原采用51×51×7网格点,3km水平分辨率的结果(图 3,见彩页)对比,两种结果所得的风场结构及变化趋势是比较一致的,都能反映出风场辐合的发展变化及其基本特征。但是6km分辨率的风场结构由于分辨率变小,流场更平滑,很多细节的信息无法显示出来。雷达资料作为高分辨率的观测工具,我们一般取3km分辨率的风场结果比较好。
除了改变分辨率外,本文又将个例2反演区域分成4部分,格点设为26×26×7,水平分辨率为3km×3km,分别以距离雷达(84, -66)、(9, -66)、(9, -141)、(84, -141)为反演中心,并将其结果拼成与其它试验反演区域一致的结果,风场结构基本一致(图略),但是分割成4部分使得边界增多,误差增大,与试验2风场的均方根差别各时刻平均为7.13m·s-1。
从以上两个方面的反演结果说明了格点和分辨率对模式结果影响不大。我们认为一般选择分辨率较高,网格数较多的模式参数进行模式运算,以便了解更多的中尺度信息。
以上给出了个例2和个例3进行各种试验的结果;对济南雷达资料进行了同样的试验分析,所得结果与此相一致,就不再赘述了。
4 结论和讨论为了研究4DVAR方法反演风场的能力,探讨在实际业务工作中的应用潜力,本文利用广州、济南天气雷达观测的3个个例资料,从湿过程、纯动力过程、迭代次数、计算时间、背景场、初始场、分辨率和反演范围等方面,对反演风场进行了定量的分析,初步得到如下结论:
(1) 利用前一时次反演结果作为背景场,考虑湿过程的云模式迭代40次的4DVAR系统,反演的水平风场反算出来径向速度场与原始径向速度场的分布基本一致,与回波符合较好,具有一定的反演中尺度风场结构的能力,结果基本合理,能提供如低层辐合、切变线、中气旋、飑线过程等中小尺度的信息。
(2) 将模式移植到配置为Pentium4 Processor 2.0G/RAM 1G/PC机上,迭代15~20次可在6分钟内完成。通过比较发现,利用前一时次反演结果作为背景场干模式迭代15次与湿模式迭代40次的差异较小,前者能基本反映出风场特征。在业务工作中,预报员主要是考虑具有明显中尺度特征的区域,以便可以更及时更准确地得到预报结论。所以在4DVAR同化技术业务运行时,为了适应风暴快速移动和发展的特点,可以采用前一时次反演结果作为背景场干模式迭代15~20次的风场结果。
(3) 使用前一时刻模式循环结果作为初猜场和背景场,可以取得更好的反演效果,尤其是迭代次数不多的情况。VAD分析代表所在区域平均风廓线情况,它对模式结果具有较强的敏感性,没有前一时刻模式循环结果作为背景场时,在流场变化不大的情况下,使用VAD分析也可以获得较好的反演效果;如果反演区域风场变化较大,误差也会加大;在迭代次数较少的时,使用零速度场作为初始场误差较大,不宜采用。
(4) 为了检验“干”模式的稳定性,本文通过改变网格点数和分辨率,对相同区域进行反演,得到的风场结果差异很小,说明格点大小和反演区域的变化对风场反演结果影响不大。考虑中小尺度信息的特点,我们一般选择分辨率较高,网格数较多的模式参数进行运算。
在实际雷达观测中,不能保证模式所有格点都有雷达资料。由于雷达实际观测总有一定的仰角,所以当云体离雷达较远时,或者由于地物遮挡等原因,云体的底部观测不到,下层体扫资料不可用等。这都需要对模式的初始场进一步改进,例如在模式中加入其它的观测资料,尤其是中小尺度的与雷达观测分辨率相匹配的观测资料对提高模式的准确性有很大的作用。除了雷达资料本身的问题外,同时还由于现有最优化算法的局限性,其收敛性因模式约束的引入而降低,并因初猜场的粗糙而往往收敛不到最小值,而是收敛到局部极值。这些原因都有可能严重影响了四维变分同化所应有的效果。
致谢:NCAR孙娟珍博士提供了变分同化算法源程序,广州、济南等雷达站提供了观测资料,在此一并致谢。感谢曹俊武、胡志群等对论文的写作和翻译方面提供的帮助!
| [1] |
许小永, 郑国光. 多普勒雷达反演技术及雷达资料在数值模式中的应用[J]. 气象, 2005, 31(3): 7-11. DOI:10.7519/j.issn.1000-0526.2005.03.002 |
| [2] |
周海光, 张沛源. 多种单多普勒雷达风场反演方法对比试验[J]. 气象, 2004, 26(5): 13-16. |
| [3] |
Sun J, A. Crook. Dynamical and microphysical retrieval from Doppler radar ob servations using a cloud model and its adjoint, Part I: Model development and simulated data experiments. J Atmos Sci, 1997, 54(12): 1642-1661.
|
| [4] |
许小永. 四维变分和集合卡尔曼滤波同化多普勒雷达资料的方法及其反演暴雨中尺度结构的研究[J]. 南京信息工程大学博士学位论文, 2005, 4: 658-663. |
| [5] |
Sun J, Crook A. Real-time Low-Level Wind and Temperature Analysis Using Single WSR-88D Data[J]. Weather and Forecasting, 2001a, 16: 117-132. DOI:10.1175/1520-0434(2001)016<0117:RTLLWA>2.0.CO;2 |
| [6] |
Sun J. Convective scale 4-D data assimilation using simulated single-Doppler radar observations. Ph. D. dissertation, University of Oklahoma, 1992: 174.
|
| [7] |
许小永, 郑国光, 刘黎平. 多普勒雷达资料4DVAR同化反演的模拟研究[J]. 气象学报, 2004, 62(4): 410-421. DOI:10.11676/qxxb2004.042 |
| [8] |
周海光, 王玉彬. 多部多普勒雷达同步探测三维风场反演系统[J]. 气象, 28(9): 7-11. |
| [9] |
周海光, 王玉彬. 一次梅雨锋降水系统三维风场双、三雷达对比研究[J]. 气象, 29(5): 14-17. |